只是扫个地而已,怎么连A超都用上了
萧箫 发自 凹非寺
量子位 报道 | 公众号 QbitAI
现在连“扫地”,都卷成这样了吗?

光是识别个地毯,就用上了超声波:

只需要像A超诊断一样,“倾听”回声情况,就能识别出地毯的种类,从而将杂质清理干净。

用超声波也就算了,它还能靠“重低音”,将咖啡渍轻轻松松震动除去:

没错,就是弹贝斯的那种感觉~
不就是扫个地而已么,这个机器人为何要用上这么多黑科技?
超声波识别地毯,弥补AI短板
事实上,超声波技术并非噱头——
它在医学、汽车、无人机等行业的应用,非常广泛。
例如,最近盛大创始伉俪陈天桥和雒芊芊投资的脑机接口中心,就在不损伤脑组织的情况下,用超声波实现了“读心术”。
这项研究,将超声波探测到的脑活动、和肢体运动联系起来,并用机器学习算法加以分析,成功根据脑活动,预测了肢体运动。

此外,还用到了新冠病毒的研究上。
MIT研究人员发现,在一定条件下,超声波能让新冠病毒的外壳和蛋白质尖峰坍塌、破裂,使得病毒无法侵入人体细胞。
在汽车和无人机上,超声波传感器也得到了大量应用。
比如,倒车雷达。

那扫地机器人为什么要用上超声波呢?
实际上,超声波是帮助机器人识别地毯的。
清洁地毯时,机器人不能像擦地那样,直接拖上去——
万一刚好是纯毛地毯,你的扫地机器人直接湿着拖布一寸寸擦过,然后你光脚踩了上去……

加上超声波传感器后,扫地机器人就能对地板材质做出判断,原理上类似于A超的诊断方法:
A型超声诊断以回波的波幅高低、波数多少、回波形态、动态及位置距离为依据,对组织器官的形态学及功能的改变,进行分析判断。
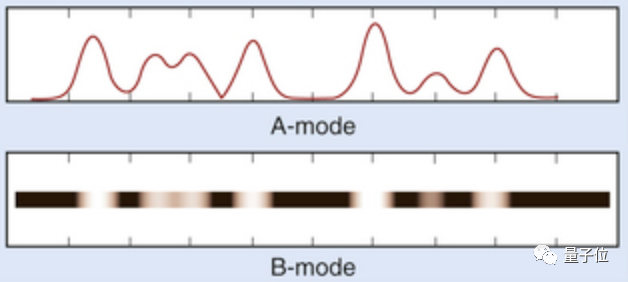
当遇到光滑地板时,超声波被吸收的程度很小,传感器所呈现的就是连续不断“回弹”的波。

而遇到多毛地毯时,通过与表面的柔性材料之间的摩擦,超声波就会被吸收掉。
这时候,扫地机器人没有听见自己的回声,就会明白:
前面即将到达地毯区域。
但,为什么偏偏选择超声波识别,而不用最先进的AI目标检测算法?
如果说,AI目标检测是用“视觉”检测,超声波更像是一种“触觉”检测方式。

因此AI目标检测的实际效果,依赖于很多条件:
光照、地毯颜色、检测角度、实时处理速度、摄像头清晰程度……
以光照和地毯颜色为例。
如果室内光线较暗,地毯颜色又恰好比较深,AI就极有可能将地毯误检成地板。

而超声波,却不受这些条件的影响,就像是在摸黑躲猫猫时,摸到了自己的被子这种感觉。
既然如此,又为何不用其他声波呢?
平时生活中,我们会制造出大量声音。

要是用声波来探测地毯,那扫地机器人收到的声音,可能就不再是最初发出的了。
不仅如此,发出的声波,还可能和机器人接收的声波发生干涉,直接消失。
这里的干涉,就是当两列波频率相同、振动方向相同、相位差恒定时,就会发生增强、或者相互抵消的情况。
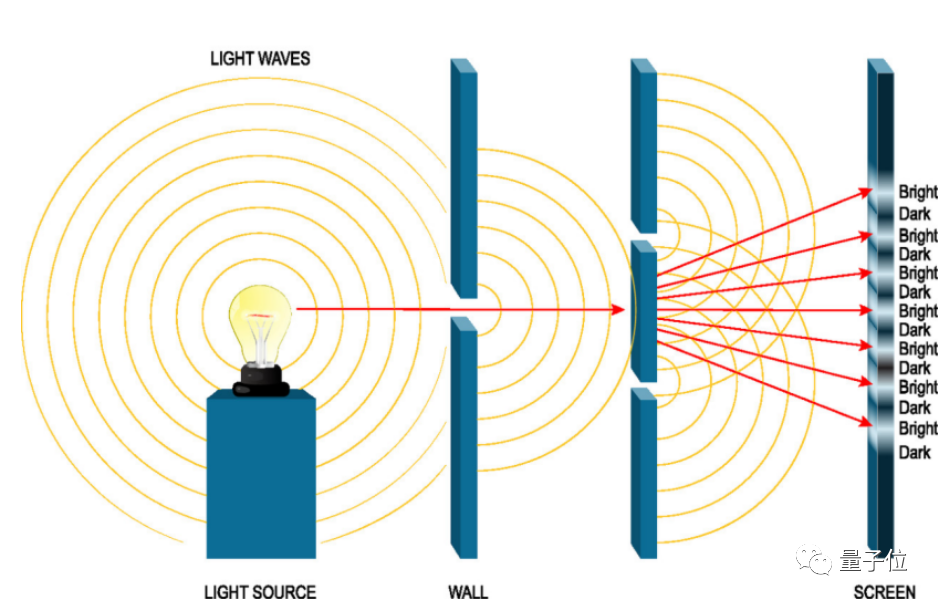
但对于超声波而言,除了相干波,几乎没有其他情况能干扰到它的运行。
相较于普通声波,超声波还有一个最大的特点:频率超过20kHz,波长超出人耳听力范围。
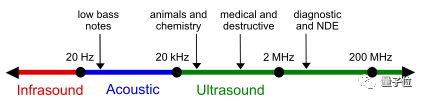
也意味着,超声波对人体几乎不造成干扰。
这一点,次声波就无法满足。它会与人体某些内脏器官引起共振,因此可能会让人出现恶心、呕吐等不适的情况。
这也就能理解,为什么在汽车行业中,超声波感知器能被广泛应用。
不过,扫地机器人实现超声波地毯识别,也并没有那么简单。
首先,需要专门购置各种不同形状、材质、毛长、形状的地毯,来建立地毯识别库。

毕竟,短毛、长毛,采用的吸力可能不一样;而材质不同的地毯,采用的清扫方式也完全不同。
例如,橡胶地毯,就可以直接上手拖布。

超声波传感器接收到反射波后,系统会根据传回来的波形进行判断,选择最合适的清扫模式。
然而,如果拖布位置无法改变,“识别地毯”不就没啥用?
为了优化体验,机器人还得再下点功夫。
拖布可升降,还能用“重低音”擦地
首先,就是让拖布尽可能“只出席重要场合”。
例如,用上自动升降擦地模组。
让机器人自行判断,什么时候需要“缩回肚子里”。
比如,当机器人遇上了地毯、门槛、或者滑溜溜的风扇底座、叉型桌脚时,拖布会提升5mm,保证不增加工作负担。

如果越过障碍物的难度本身不高,那么一边清扫,一边跨过障碍物,也没有问题。
然后,加上声波震动。
不过这里的声波,是用来协助擦地的,也与超声波互不干扰。
根据频率的不同,这种声波可以被分成三档,50Hz、38Hz和28Hz。

即使是最高的一档,震动速度达到3000次/分,发出的声音也只是勉强接近贝斯,可以说是低噪音了。
那么,为什么声波能通过震动,来更好地除去污渍呢?
见过超声波清洗眼镜的同学,应该能理解声波在水中的威力。

由于水的密度更高,传递震动的能力也越强。
原本没那么容易清除的污渍,有了声波加成,就能被强行“卸下”。
而为了扫地机器人更好地带走污渍,还需要一个双区拖布。
在负责声波震动的区域,拖布主要负责震落污渍,再利用非震动区域一套拖布带走。

具体效果如何?
结合6N的擦地压力,这种“声波震动”擦地技术,能去除最顽固的污渍之一——咖啡渍,有效率达到91.41%。
相比于石头扫地机器人S5系列,清洁力水平直接提升了4倍。
要满足声波震动擦地、和不时升降拖布这两个条件,这么大的动力需求,从哪里来?
无刷电机。相比有刷电机的性能和寿命,无刷电机是能“身负重任”的。
事实上,除了这次最大的亮点——声波震动擦地系统+自动升降擦地模组以外,这个机器人在避障算法上,也选择了进一步探索:
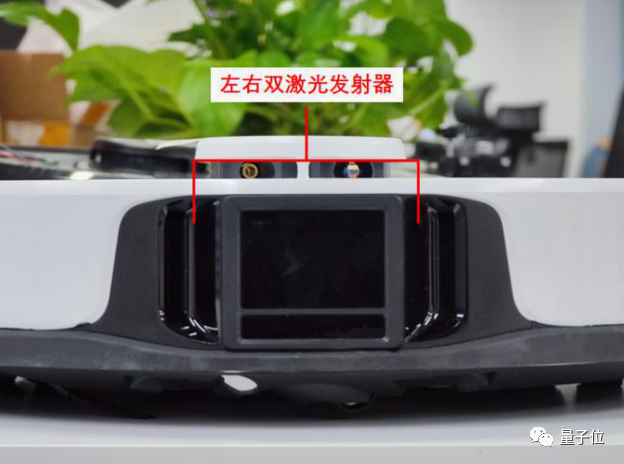
采用了3D双线结构光+AI避障策略。
即利用双线结构光,代替了传统的红外光源,在暗光环境下无需额外补光。
咦?那是手机人脸解锁所用的结构光吗?
不。
手机人脸解锁采用的结构光,是面阵;而扫地机器人所用的结构光,则是线阵。

功能不同,用法也就不一样。
面阵结构光,是为了判断整个面的3D形状;而线阵结构光,主要目的则在于3D测距。
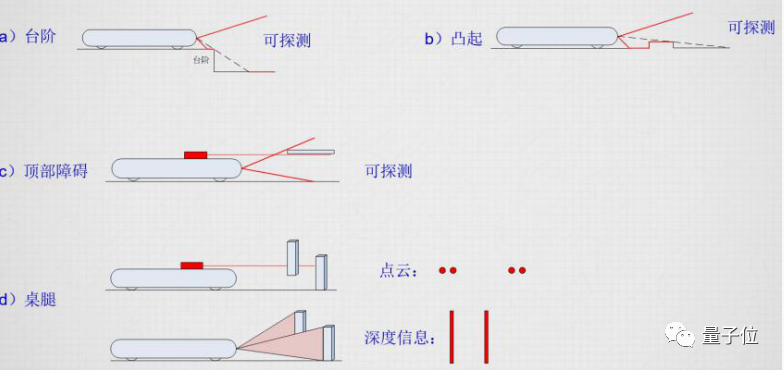
只需要将两条竖直的激光线束进行交叉,再结合机器人在行进过程中的距离、旋转角度等信息,算法就能进一步完善房间的信息,从而避开障碍物。
所以,这是什么最新的扫地机器人实验研究吗?
“不会停止对技术的探索”
熟悉的朋友或许知道,这种能在扫地机器人应用上,始终保持各项技术领先的公司,其实并不多。
而国内差不多就小米生态链的石头科技了。
没错,这次所介绍的扫地机器人,也是来自石头科技最新发布的石头扫拖机器人T7S Plus。
这个自2016年来,一路杀进扫地机器人市场的企业,似乎就没有在技术上走进过自己的“舒适区”。

最初,激光雷达开始被应用于智能车行业时,石头科技就率先在扫地机器人行业中,开辟了“LDS激光雷达+SLAM算法”的技术应用。
现在,在擦地开始成为普遍技术时,石头科技又再次率先推出了“超声波地毯识别+自动升降擦地模组”的创新打法。
那么,超声波地毯识别都有了,类似于超声波识别的其他前沿技术,是不是也能安排上?
对此,石头科技回应:
只要这些技术,能帮助用户更好地解放双手,提升机器扫拖性能,我们就都会去尝试。
看来确实是能安排上了。
— 完 —
本文系网易新闻?网易号特色内容激励计划签约账号【量子位】原创内容,未经账号授权,禁止随意转载。

量子位?QbitAI · 头条号签约作者
?'?' ? 追踪AI技术和产品新动态
一键三连「分享」、「点赞」和「在看」
科技前沿进展日日相见~
关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/
 量子位
量子位
 关注网络尖刀微信公众号
关注网络尖刀微信公众号随时掌握互联网精彩







- 1 《求是》发表习近平总书记重要文章 7904015
- 2 勇敢夺枪老人与妻子相拥倒在现场 7809527
- 3 中美卫星惊险“擦肩”距离仅200米 7714663
- 4 明年经济工作政策取向确立这八个字 7618944
- 5 “中国最冷小镇”最低温降至-39℃ 7523526
- 6 男子陪女友逛街买刮刮乐中80万元 7424427
- 7 30万级的玛莎拉蒂两天被一抢而空 7328154
- 8 扫地机器人鼻祖要破产了 7238133
- 9 男子买炒饼打包5头蒜被老板劝退 7137053
- 10 如何让你我的钱袋子鼓起来 7046508