
机器狗逐渐“猫化”,利用简单的反射电路和肌肉重现让机器狗走猫步!

大数据文摘授权转载自机器人大讲堂
让机器狗走猫步,是种什么样的体验?
?
有位日本小哥有话要说,他发明了一只长47厘米,重7.6公斤的机器狗,外表平平无奇,却在跑步机上走起了猫步。

有人质疑“这哪像猫步了?和其他的机器狗走路没两样啊!”
?
其实,看似平凡的步伐,实则暗藏玄机。
?
它没有用诸如波士顿动力般复杂的算法构架,而是复刻了猫咪走路时的反射行为,利用动物神经和肌肉的特征让机器狗逐渐“猫化”。

不仅如此,还在《Frontiers in Neurorobotics(神经机器人学 前沿)》上发表了论文。

复刻猫咪,走出六亲不认的步伐
复刻猫咪,走出六亲不认的步伐
想走猫步,得先知道猫是怎么行走的。
?
当猫咪的jiojio踏在地面时,膝盖肌肉受到力,腰部就会向后移动;腰部肌肉受到力的话,膝盖则会伸长,两个部位之间发生自动联动,“六亲不认”的步伐就这样走起来了。

从膝盖延伸到腰部的回路,反过来从腰部延伸到膝盖的回路,这种交叉发挥作用在研究中被称为“反射回路”,它可以产生稳定的步态和腿部运动轨迹。近年来的研究也表明,猫咪行走时不需要大脑内部神经的复杂交互,而是利用这种反射回路来进行稳定的运动。
反射电路与肌肉特性的再现
反射电路与肌肉特性的再现
那么问题又来了,机器狗又没有肌肉,也没有神经,怎样将这种“反射回路”运用在机器狗身上呢?
?
这里主要解决两个问题,首先,是肌肉特性的建模。
?
日本小哥利用了希尔肌肉模型,来重现机器狗的肌肉特征。
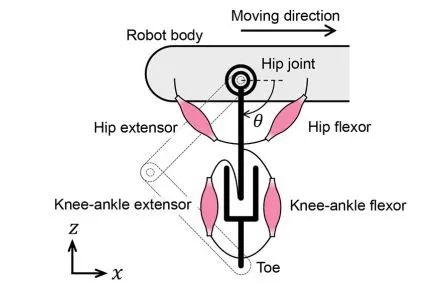
在模型中,机器狗的两条腿重现了具有虚拟旋转髋关节和臀部与脚之间的线性关节,伸肌和屈肌放置在每个虚拟关节上,虚拟旋转关节和线性关节的肌肉分别对应于猫咪的腰部肌肉和膝盖肌肉。

重现了肌肉模型后,就要建立机器狗的腰部和膝盖伸肌之间的“反射回路”模型。

日本小哥在肌肉模型中嵌入了兴奋性反射通路,如果膝盖关节接收器感测到地面反作用力,则肌肉会将信号延伸到腰部接收器;反过来,如果腰部伸肌完全伸展并产生张力,则肌肉会“感受”到信号启动,传递给膝盖关节,进行姿势的转变。

机器狗的“猫步”步行实验
机器狗的“猫步”步行实验
来吧,模型都建好了,跑步机上走起来!

把机器狗放在跑步机上,无需按开关,脚上的接收器一旦获得地面的反作用力,立刻激活反射电路。

刚开始的两步有点跌跌撞撞,不过越走越稳定。
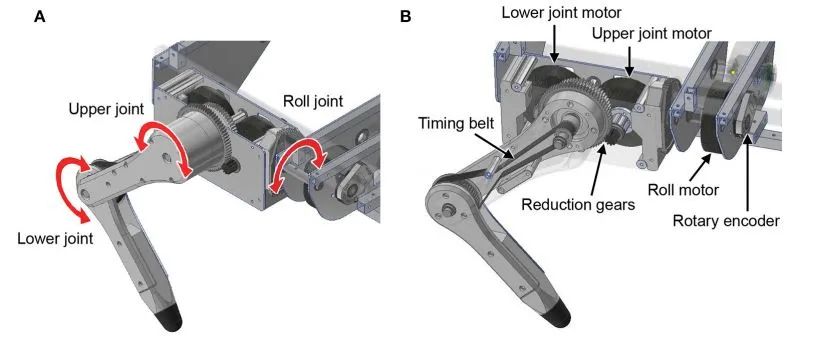
机器狗安装了微控制器(Teensy 3.6)提供高级控制,从电动机驱动器接收到的角度信息来模拟虚拟肌肉和反射电路,并命令目标转矩将其特性再现给电动机驱动器。
当切断机器狗的反射回路后,狗的行走就会变得不稳定,发生了脚无法从地面抬起的现象。

让机器狗走猫步的这位日本小哥是大阪大学机械工程系的硕士研究生,他表示:“大部分的四足机器人的稳定行走都利用了中央发射器(CPG),我们的研究证明,新颖的反射电路也能给“机器狗”稳定的步态,实现能够像动物一样高效灵活地移动的机器人。”

【参考链接】


关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/
 大数据文摘
大数据文摘
 关注网络尖刀微信公众号
关注网络尖刀微信公众号随时掌握互联网精彩






- 1 习近平将发表二〇二六年新年贺词 7904141
- 2 2026年国补政策来了 7808738
- 3 东部战区:开火!开火!全部命中! 7712893
- 4 2026年这些民生政策将惠及百姓 7616985
- 5 小学食堂米线过期2.5小时被罚5万 7519709
- 6 解放军喊话驱离台军 原声曝光 7428214
- 7 为博流量直播踩烈士陵墓?绝不姑息 7327605
- 8 每月最高800元!多地发放养老消费券 7238391
- 9 数字人民币升级 1月1日起将计付利息 7141831
- 10 2026年1月1日起 一批新规将施行 7040675