
创建可微物理引擎Nimble,开源SOTA人体骨骼模型,斯坦福腿疾博士生用AI「助跑」人生
机器之心报道
编辑:杜伟、陈萍
身残志坚,斯坦福大学的这位人工智能 + 机器人博士生想用技术克服身体缺陷。


pip install nimblephysics
import?nimblephysics?as?nimbleimport?osworld:?nimble.simulation.World = nimble.simulation.World()arm: nimble.dynamics.Skeleton = world.loadSkeleton(os.path.join(os.path.dirname(__file__), "./KR5.urdf"))# Your code heregui = nimble.NimbleGUI(world)gui.serve(8080)gui.blockWhileServing()
print(arm.getPositions())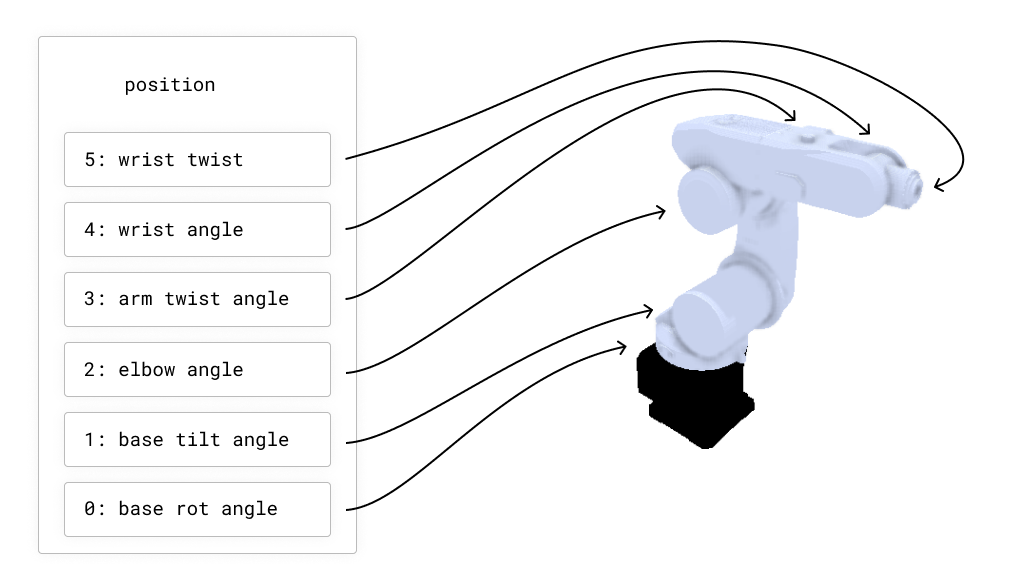
arm.setPositions([0, 0, -90*(3.1415/180), 0, 0, 0])
arm.setVelocities([0, 0, 1, 0, 0, 0])
# Create a Rajagopal skeleton and add it to the worldhuman: nimble.dynamics.Skeleton = nimble.RajagopalHumanBodyModel()world.addSkeleton(human)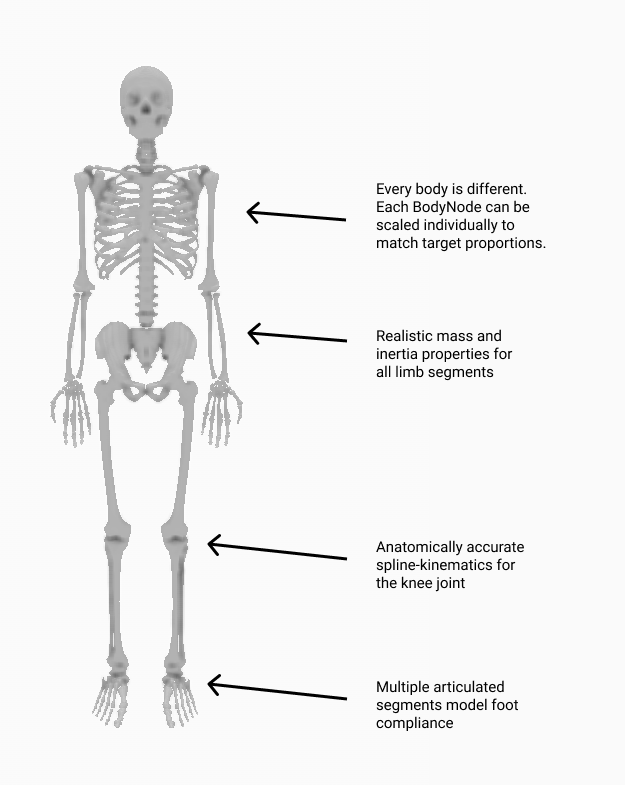
与吴恩达共话ML未来发展,2021亚马逊云科技中国峰会可「玩」可「学」
2021亚马逊云科技中国峰会「第二站」将于9月9日-9月14日全程在线上举办。对于AI开发者来说,9月14日举办的「人工智能和机器学习峰会」最值得关注。
当天上午,亚马逊云科技人工智能与机器学习副总裁Swami Sivasubramanian 博士与 AI 领域著名学者、Landing AI 创始人吴恩达(Andrew Ng )博士展开一场「炉边谈话」。
不仅如此,「人工智能和机器学习峰会」还设置了四大分论坛,分别为「机器学习科学」、「机器学习的影响」、「无需依赖专业知识的机器学习实践」和「机器学习如何落地」,从技术原理、实际场景中的应用落地以及对行业领域的影响等多个方面详细阐述了机器学习的发展。
点击阅读原文,立即报名。

??THE END?
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/






 机器之心
机器之心
 关注网络尖刀微信公众号
关注网络尖刀微信公众号随时掌握互联网精彩
赞助链接






排名
热点
搜索指数
- 1 习近平将发表二〇二六年新年贺词 7904141
- 2 2026年国补政策来了 7808738
- 3 东部战区:开火!开火!全部命中! 7712893
- 4 2026年这些民生政策将惠及百姓 7616985
- 5 小学食堂米线过期2.5小时被罚5万 7519709
- 6 解放军喊话驱离台军 原声曝光 7428214
- 7 为博流量直播踩烈士陵墓?绝不姑息 7327605
- 8 每月最高800元!多地发放养老消费券 7238391
- 9 数字人民币升级 1月1日起将计付利息 7141831
- 10 2026年1月1日起 一批新规将施行 7040675