自动驾驶权威评测世界第一,鉴智机器人推出纯视觉3D感知新范式
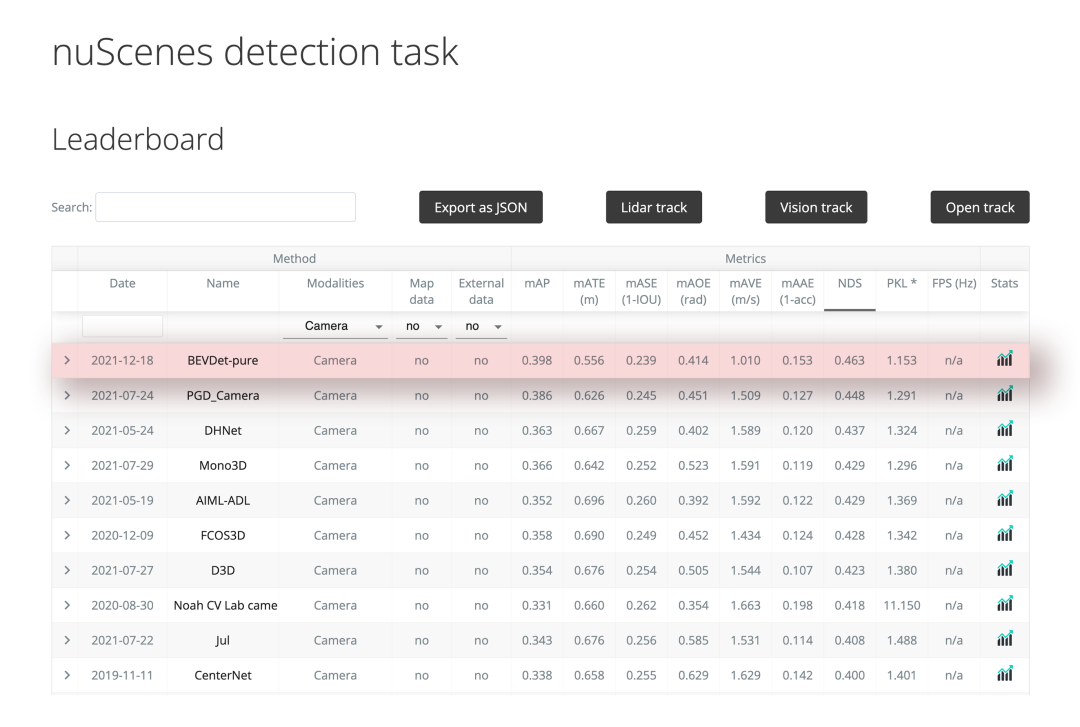
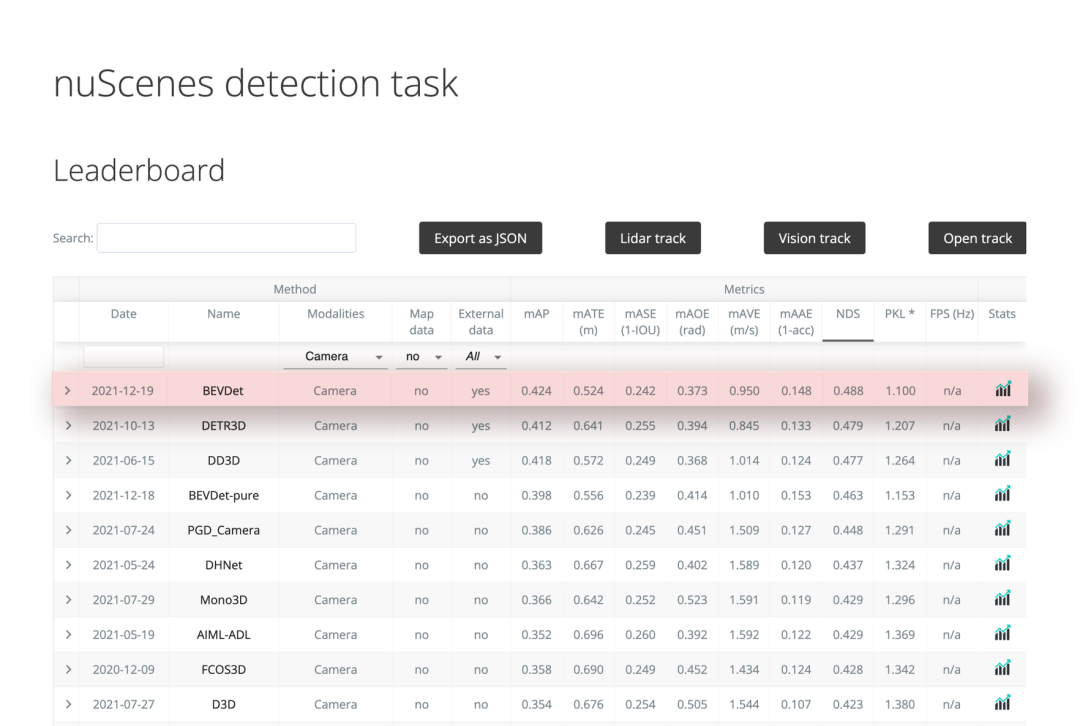
鉴智机器人的下一代纯视觉自动驾驶 3D 目标检测框架 BEVDet,为解决视觉为主自动驾驶解决方案中视觉雷达、4D 感知、实时局部地图等关键问题提供了更多可能性。

BEVDet技术报告链接:https://arxiv.org/abs/2112.11790
BEVDet 框架具有较强的扩展性,鉴智机器人正基于 BEVDet 进行扩展,实现视觉雷达、4D 感知、实时局部地图等自动驾驶关键模块;
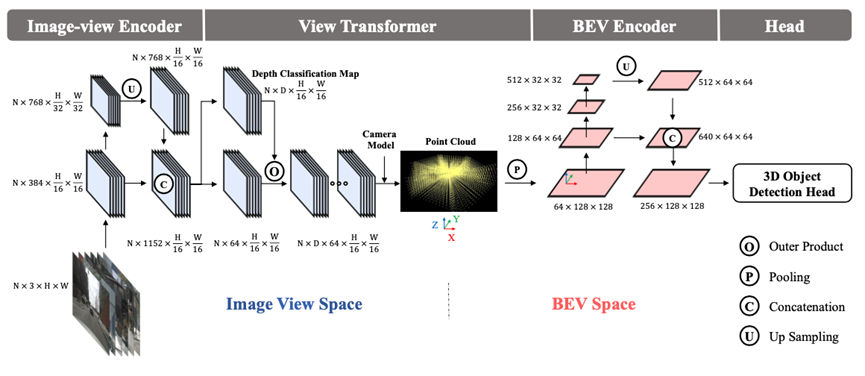
BEVDet 基于相机模型构建 view-transformer ,可有效降低视觉变换模块的学习难度,相比特斯拉所使用的不带先验的 attention-based-view-transformer,此方案可大幅度减少模型对数据量需求,使模型在数据量有限情况下的具备更强的泛化性能;
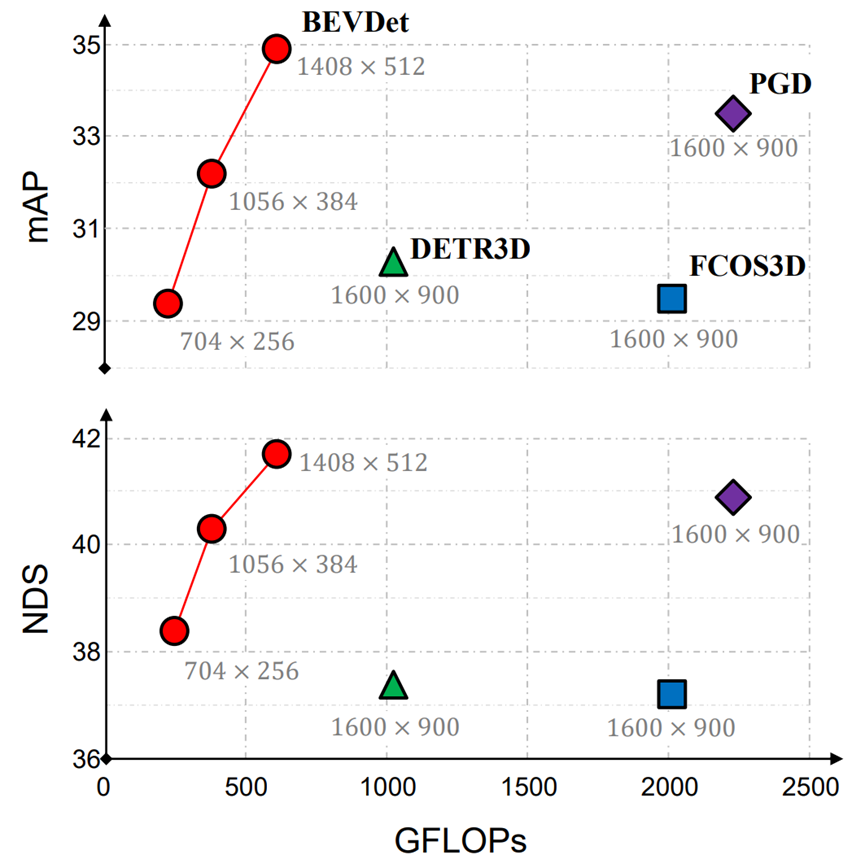
BEVDet 利用更低的算力达到同样或者更好的算法效果,将有助于自动驾驶系统的算力利用效率的提升。

??THE END?
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/






 机器之心
机器之心
 关注网络尖刀微信公众号
关注网络尖刀微信公众号随时掌握互联网精彩
赞助链接







排名
热点
搜索指数
- 1 中国经济向世界提供“机遇清单” 7904681
- 2 朱元璋换帅照后明孝陵火了 7808191
- 3 价格大跳水 1克拉大钻石只要3500元 7712955
- 4 2025这些“经济”持续成长壮大 7617559
- 5 曾经火遍全网的曹县现在怎样了 7524502
- 6 百事关闭多家工厂 7426549
- 7 阿姨1984年花两千多买了150克黄金 7329322
- 8 西班牙女员工连续提前到岗被开除 7234538
- 9 大疆回应多地无人机黑飞至8000米 7139086
- 10 寒潮来袭!多地气温将创下半年来新低 7042462